געצייַג באַשטעטיקן איז די הויפּט אָפּעראַציע און וויכטיק בקיעס אין CNC מאַשינינג. אונטער זיכער טנאָים, די אַקיעראַסי פון מכשירים באַשטעטיקן קענען באַשטימען די מאַשינינג אַקיעראַסי פון טיילן. אין דער זעלביקער צייט, די עפעקטיווקייַט פון די געצייַג באַשטעטיקן אויך אַפעקץ די CNC מאַשינינג עפעקטיווקייַט. עס איז נישט גענוג צו נאָר וויסן די מיטל באַשטעטיקן מעטהאָדס. איר מוזן אויך וויסן די פאַרשידן מכשירים באַשטעטיקן מעטהאָדס פון די CNC סיסטעם און ווי צו רופן די מעטהאָדס אין די פּראַסעסינג פּראָגראַם. אין דער זעלביקער צייט, איר מוזן וויסן די אַדוואַנטידזשיז, דיסאַדוואַנטידזשיז און באַניץ טנאָים פון פאַרשידן מכשירים באַשטעטיקן מעטהאָדס.

1. פּרינציפּ פון מעסער באַשטעטיקן
דער ציל פון מכשירים באַשטעטיקן איז צו פאַרלייגן די וואָרקפּיעסע קאָואָרדאַנאַט סיסטעם. ינטויטיוולי גערעדט, געצייַג באַשטעטיקן איז צו פאַרלייגן די שטעלע פון די וואָרקפּיעסע אין די מאַשין געצייַג וואָרקבענטש. אין פאַקט, עס איז צו געפֿינען די קאָואָרדאַנאַץ פון די געצייַג באַשטעטיקן פונט אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם.
פֿאַר CNC ליידז, די געצייַג באַשטעטיקן פונט מוזן ערשטער זיין אויסגעקליבן איידער פּראַסעסינג. די געצייַג באַשטעטיקן פונט רעפערס צו די סטאַרטינג פונט פון די געצייַג באַוועגונג קאָרעוו צו די וואָרקפּיעסע ווען די CNC מאַשין געצייַג איז געניצט צו פּראָצעס די וואָרקפּיעסע. די געצייַג באַשטעטיקן פונט קענען זיין שטעלן אויף די וואָרקפּיעסע (אַזאַ ווי די פּלאַן דאַטום אָדער פּאַזישאַנינג דאַטום אויף די וואָרקפּיעסע), אָדער עס קענען זיין שטעלן אויף די ייַנאָרדענונג אָדער מאַשין געצייַג. אויב עס איז באַשטימט אויף אַ זיכער פונט אויף די ייַנאָרדענונג אָדער מאַשין געצייַג, די פונט מוזן זיין קאָנסיסטענט מיט די פּאַזישאַנינג דאַטום פון די וואָרקפּיעסע. האַלטן דימענשאַנאַל באַציונגען מיט אַ זיכער גראַד פון אַקיעראַסי.
ווען באַשטעטיקן די געצייַג, די געצייַג שטעלע פונט זאָל צונויפפאַלן מיט די געצייַג באַשטעטיקן פונט. די אַזוי גערופענע געצייַג שטעלע פונט רעפערס צו די פּאַזישאַנינג רעפֿערענץ פונט פון די געצייַג. פֿאַר טורנינג מכשירים, די געצייַג שטעלע פונט איז די געצייַג שפּיץ. דער ציל פון געצייַג באַשטעטיקן איז צו באַשטימען די אַבסאָלוט קאָואָרדאַנאַט ווערט פון די געצייַג באַשטעטיקן פונט (אָדער וואָרקפּיעסע אָנהייב) אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם און מעסטן די געצייַג שטעלע דיווייישאַן ווערט פון די געצייַג. די אַקיעראַסי פון מכשירים פונט אַליינמאַנט גלייַך אַפעקץ די מאַשינינג אַקיעראַסי.
ווען אַקשלי פּראַסעסינג די וואָרקפּיעסע, די נוצן פון איין געצייַג קען בכלל נישט טרעפן די פּראַסעסינג רעקווירעמענץ פון די וואָרקפּיעסע, און קייפל מכשירים זענען יוזשאַוואַלי געניצט פֿאַר פּראַסעסינג. ווען ניצן קייפל אויסגעדרייט מכשירים פֿאַר פּראַסעסינג, ווען די געצייַג טוישן שטעלע בלייבט אַנטשיינדזשד, די דזשיאַמעטריק שטעלע פון די געצייַג שפּיץ פונט וועט זיין אַנדערש נאָך געצייַג טוישן, וואָס ריקווייערז פאַרשידענע מכשירים צו קענען צו פּראָצעס אין פאַרשידענע סטאַרטינג שטעלעס ווען סטאַרטינג פּראַסעסינג. פאַרזיכערן אַז די פּראָגראַם לויפט נאָרמאַלי.
Xinfa CNC מכשירים האָבן די טשאַראַקטעריסטיקס פון גוט קוואַליטעט און נידעריק פּרייַז. פֿאַר פרטים, ביטע באַזוכן:
קנק מכשירים מאַניאַפאַקטשערערז - טשיינאַ קנק מכשירים פאַבריק & סופּפּליערס (xinfatools.com)
אין סדר צו סאָלווע דעם פּראָבלעם, די מאַשין געצייַג CNC סיסטעם איז יקוויפּט מיט אַ דזשיאַמעטריק שטעלע פאַרגיטיקונג פונקציע. ניצן די דזשיאַמעטריק שטעלע פאַרגיטיקונג פֿונקציע פון די געצייַג, איר נאָר דאַרפֿן צו מעסטן די שטעלע דיווייישאַן פון יעדער געצייַג אין שטייַגן צו אַ פאַר-געקליבן רעפֿערענץ געצייַג און אַרייַנשרייַב עס אין די CNC סיסטעם. ספּעציפיצירן די גרופּע נומער אין די מכשירים פּאַראַמעטער קערעקשאַן זייַל און נוצן די ט באַפֿעל אין די מאַשינינג פּראָגראַם צו אויטאָמאַטיש פאַרגיטיקן די דיווייישאַן פון די געצייַג שטעלע אין די געצייַג דרך. די מעזשערמאַנט פון די דיווייישאַן פון מכשירים שטעלע אויך דאַרף זיין אַטשיווד דורך מכשירים באַשטעטיקן אַפּעריישאַנז.
2. מעסער באַשטעטיקן אופֿן
אין CNC מאַשינינג, די יקערדיק מעטהאָדס פון געצייַג באַשטעטיקן אַרייַננעמען פּראָצעס קאַטינג אופֿן, געצייַג באַשטעטיקן קיילע באַשטעטיקן און אָטאַמאַטיק געצייַג באַשטעטיקן. דער אַרטיקל נעמט CNC מילינג מאשינען ווי אַ ביישפּיל צו באַקענען עטלעכע קאַמאַנלי געוויינט מכשירים באַשטעטיקן מעטהאָדס.
1. פּראָצעס קאַטינג און מעסער באַשטעטיקן אופֿן
דעם אופֿן איז פּשוט און באַקוועם, אָבער עס וועט לאָזן קאַטינג מאַרקס אויף די ייבערפלאַך פון די וואָרקפּיעסע און האט נידעריק געצייַג באַשטעטיקן אַקיעראַסי. גענומען די געצייַג באַשטעטיקן פונט (וואָס קאָוינסיידז מיט די אָנהייב פון די וואָרקפּיעסע קאָואָרדאַנאַט סיסטעם) אין די צענטער פון די וואָרקפּיעסע ייבערפלאַך ווי אַ בייַשפּיל, די ביילאַטעראַל געצייַג באַשטעטיקן אופֿן איז געניצט.
(1) געצייַג באַשטעטיקן אין רענטגענ און י ריכטונג.
① ינסטאַלירן די וואָרקפּיעסע אויף די וואָרקבענטש דורך די קלאַמערן. ווען קלאַמפּינג, עס זאָל זיין פּלאַץ פֿאַר געצייַג באַשטעטיקן אויף די פיר זייטן פון די וואָרקפּיעסע.
② אָנהייב די שפּינדל צו דרייען מיט מיטל גיכקייַט, געשווינד מאַך די וואָרקטייבאַל און שפּינדל, לאָזן די געצייַג געשווינד מאַך צו אַ שטעלע מיט אַ זיכער זיכער ווייַטקייט נאָענט צו די לינקס זייַט פון די וואָרקפּיעסע, און דאַן רעדוצירן די גיכקייַט און מאַך נאָענט צו די לינקס זייַט פון די וואָרקפּיעסע.
③ ווען אַפּראָוטשינג די וואָרקפּיעסע, נוצן פיין-טונינג אָפּעראַציע (יוזשאַוואַלי 0.01 מם) צו באַקומען נעענטער, און לאָזן די געצייַג סלאָולי צוגאַנג די לינקס זייַט פון די וואָרקפּיעסע אַזוי אַז די געצייַג נאָר רירט די לינקס זייַט ייבערפלאַך פון די וואָרקפּיעסע (אָבסערווירן, הערן צו די קאַטינג געזונט, קוק אין די קאַטינג מאַרקס, און קוק אין די טשיפּס, ווי לאַנג ווי אויב אַ סיטואַציע אַקערז, וואָס מיטל אַז די געצייַג קאָנטאַקט די וואָרקפּיעסע), דעמאָלט צוריקציענ זיך 0.01 מם. שרייב אַראָפּ די קאָואָרדאַנאַט ווערט געוויזן אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם אין דעם צייט, אַזאַ ווי -240.500.
④ צוריקציען די געצייַג אין די positive ז ריכטונג צו אויבן די ייבערפלאַך פון די וואָרקפּיעסע. ניצן די זעלבע אופֿן צו צוגאַנג די רעכט זייַט פון די וואָרקפּיעסע. באַמערקונג אַראָפּ די קאָואָרדאַנאַט ווערט געוויזן אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם אין דעם צייט, אַזאַ ווי -340.500.
⑤ לויט דעם, די קאָואָרדאַנאַט ווערט פון די אָנהייב פון די וואָרקפּיעסע קאָואָרדאַנאַט סיסטעם אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם איז {-240.500+(-340.500)}/2=-290.500.
⑥ סימילאַרלי, די קאָואָרדאַנאַט ווערט פון די אָריגין פון די וואָרקפּיעסע קאָואָרדאַנאַט סיסטעם אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם קענען זיין געמאסטן.
(2) געצייַג באַשטעטיקן אין ז ריכטונג.
① מאַך די געצייַג געשווינד איבער די וואָרקפּיעסע.
② אָנהייב די שפּינדל צו דרייען מיט מיטל גיכקייַט, געשווינד מאַך די וואָרקטייבאַל און שפּינדל, לאָזן די געצייַג געשווינד מאַך צו אַ שטעלע נאָענט צו דער אויבערשטער ייבערפלאַך פון די וואָרקפּיעסע אין אַ זיכער דיסטאַנסע, און דאַן רעדוצירן די גיכקייַט צו מאַך די מיטל סוף פּנים נאָענט צו דער אויבערשטער ייבערפלאַך פון די וואָרקפּיעסע.
③ ווען אַפּראָוטשינג די וואָרקפּיעסע, נוצן פיין-טונינג אָפּעראַציע (יוזשאַוואַלי 0.01 מם) צו באַקומען נעענטער, אַזוי אַז די סוף פּנים פון די געצייַג סלאָולי אַפּראָוטשיז די ייבערפלאַך פון די וואָרקפּיעסע (טאָן אַז ווען די געצייַג, ספּעציעל די סוף מיל, איז בעסטער צו שנייַדן אין די ברעג פון די וואָרקפּיעסע, די געגנט ווו די סוף פּנים פון די קאַטער קאָנטאַקט די ייבערפלאַך פון די וואָרקפּיעסע ווייניקער ווי אַ סעמיסירקלע, פּרובירן נישט צו מאַכן די צענטער לאָך פון די סוף מיל שנייַדן אונטער די ייבערפלאַך פון די וואָרקפּיעסע. סוף פּנים פון די געצייַג נאָר אָנרירן דעם אויבערשטן ייבערפלאַך פון די וואָרקפּיעסע, דעמאָלט הייבן די אַקס ווידער, רעקאָרדירן די ז ווערט אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם אין דעם צייַט, -140.400, דעמאָלט דער קאָואָרדאַנאַט ווערט פון די אָנהייב וו פון די וואָרקפּיעסע קאָואָרדאַנאַט סיסטעם אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם איז -140.400.
(3) אַרייַנשרייַב די געמאסטן רענטגענ, י, ז וואַלועס אין די מאַשין געצייַג וואָרקפּיעסע קאָואָרדאַנאַט סיסטעם סטאָרידזש אַדרעס G5* (בכלל נוצן G54~G59 קאָודז צו קראָם געצייַג באַשטעטיקן פּאַראַמעטערס).
(4) אַרייַן די טאַפליע אַרייַנשרייַב מאָדע (MDI), אַרייַן "G5 *", דריקן די אָנהייב שליסל (אין אָטאַמאַטיק מאָדע), און לויפן G5 * צו נעמען ווירקונג.
(5) קוק צי די געצייַג באַשטעטיקן איז ריכטיק.
2. פעעל מאָס, נאָרמאַל מאַנדרעל, פאַרשפּאַרן מאָס געצייַג באַשטעטיקן אופֿן
דער אופֿן איז ענלעך צו דער אופֿן פון באַשטעטיקן דעם פּראָצעס פון קאַטינג געצייַג, אַחוץ אַז די שפּינדל טוט נישט דרייען בעשאַס די באַשטעטיקן פון די געצייַג. א פילער מאָס (אָדער נאָרמאַל מאַנדרעל אָדער בלאָק מאָס) איז מוסיף צווישן די געצייַג און די וואָרקפּיעסע. די פילער מאָס קען נישט רירן פריי. באַצאָלן ופמערקזאַמקייַט צו חשבונות. ווען ניצן קאָואָרדאַנאַץ, די גרעב פון די פילער מאָס זאָל זיין סאַבטראַקטיד. ווייַל די שפּינדל טוט נישט דאַרפֿן צו דרייען פֿאַר קאַטינג, דעם אופֿן וועט נישט לאָזן מאַרקס אויף די ייבערפלאַך פון די וואָרקפּיעסע, אָבער די געצייַג באַשטעטיקן אַקיעראַסי איז נישט הויך גענוג.
3. ניצן מכשירים אַזאַ ווי ברעג פינדערז, עקסצענטריש ראַדז און אַקס סעטערס צו שטעלן די געצייַג.
די אָפּעראַציע סטעפּס זענען ענלעך צו דער פּראָצעס קאַטינג געצייַג באַשטעטיקן אופֿן, אַחוץ אַז די געצייַג איז ריפּלייסט מיט אַ ברעג מעסטער אָדער עקסצענטריש רוט. דאָס איז די מערסט פּראָסט אופֿן. עס האט הויך עפעקטיווקייַט און קענען ענשור די אַקיעראַסי פון מכשירים באַשטעטיקן. ווען איר נוצן די ברעג מעסטער, עס איז נייטיק צו מאַכן זיכער אַז די שטאָל פּילקע טייל איז אין אַ קליין קאָנטאַקט מיט די וואָרקפּיעסע. אין דער זעלביקער צייַט, די וואָרקפּיעסע צו זיין פּראַסעסט מוזן זיין אַ גוט אָנפירער און די פּאַזישאַנינג רעפֿערענץ ייבערפלאַך מוזן האָבן אַ גוט ייבערפלאַך ראַפנאַס. די ז-אַקס סעטער איז בכלל געניצט פֿאַר אַריבערפירן (ומדירעקט) געצייַג באַשטעטיקן מעטהאָדס.
4. אַריבערפירן (ומדירעקט) מעסער באַשטעטיקן אופֿן
פּראַסעסינג אַ וואָרקפּיעסע אָפט ריקווייערז די נוצן פון מער ווי איין מעסער. די לענג פון די רגע מעסער איז אַנדערש פון די לענג פון די ערשטער מעסער. עס דאַרף צו זיין נול ווידער. אָבער, מאל די נול פונט איז מאַשינד אַוועק און די נול פונט קענען ניט זיין גלייַך ריטריווד, אָדער די נול פונט קענען ניט זיין ריטריווד גלייַך. עס איז ערלויבט צו שעדיקן די פּראַסעסט ייבערפלאַך, און עס זענען עטלעכע מכשירים אָדער סיטואַטיאָנס ווו עס איז שווער צו שטעלן די געצייַג גלייַך. אין דעם פאַל, די ומדירעקט טוישן אופֿן קענען זיין געוויינט.
(1) פֿאַר דער ערשטער מעסער
① פֿאַר דער ערשטער מעסער, נאָך נוצן די פּראָצעס קאַטינג אופֿן, פילער מאָס אופֿן, אאז"ו ו. שרייַבן אַראָפּ די מאַשין געצייַג קאָואָרדאַנאַט ז1 פון די וואָרקפּיעסע אָנהייב אין דעם צייַט. נאָך דער ערשטער געצייַג איז פּראַסעסט, האַלטן די שפּינדל.
② שטעלן די געצייַג סעטער אויף די פלאַך ייבערפלאַך פון די מאַשין געצייַג וואָרקבענטש (אַזאַ ווי די גרויס ייבערפלאַך פון אַ קלעזמער).
③ אין די האַנדוויל מאָדע, נוצן די האַנט צו מאַך די וואָרקבענטש צו די צונעמען שטעלע, מאַך די שפּינדל אַראָפּ, דריקן די שפּיץ פון די געצייַג סעטער מיט די דנאָ סוף פון די מעסער, און די רעדל טייַטל וועט דרייען, פּרעפעראַבלי אין איין קרייַז. באַמערקונג אַראָפּ די אַקס אין דעם צייַט. שטעלן די אַרויסווייַזן ווערט פון די סעטער און קלאָר די קאָרעוו קאָואָרדאַנאַט אַקס צו נול.
④ הייבן די שפּינדל און אַראָפּנעמען די ערשטער מעסער.
(2) פֿאַר די רגע מעסער.
①ינסטאַלירן די רגע מעסער.
② אין די כאַנדוויל מאָדע, מאַך די שפּינדל אַראָפּ, דריקן די שפּיץ פון די געצייַג סעטער מיט די דנאָ סוף פון די מעסער, די רעדל טייַטל וועט דרייען, און דער טייַטל וועט פונט צו דער זעלביקער אָנווייַז א שטעלע ווי דער ערשטער מעסער.
③ רעקאָרד די ווערט ז0 קאָראַספּאַנדינג צו די קאָרעוו קאָואָרדאַנאַט פון דער אַקס אין דעם צייט (מיט positive און נעגאַטיוו וואונדער).
④ הייבן די שפּינדל און אַראָפּנעמען די געצייַג סעטער.
⑤ לייג z0 (מיט פּלוס אָדער מינוס צייכן) צו דער אָריגינעל ז1 קאָואָרדאַנאַט דאַטן אין G5 * פון דער ערשטער געצייַג צו באַקומען אַ נייַ קאָואָרדאַנאַט.
⑥די נייַע קאָואָרדאַנאַט איז די פאַקטיש קאָואָרדאַנאַט פון די מאַשין געצייַג קאָראַספּאַנדינג צו די וואָרקפּיעסע אָנהייב פון די רגע געצייַג. אַרייַן עס אין די G5 * ארבעטן קאָואָרדאַנאַט פון די רגע געצייַג. אין דעם וועג, די נול פונט פון די רגע געצייַג איז באַשטימט. . די איבעריקע מעסערס זענען געשטעלט אויף די זעלבע וועג ווי די רגע מעסער.
באַמערקונג: אויב עטלעכע מכשירים נוצן די זעלבע G5*, סטעפּס ⑤ און ⑥ זענען געביטן צו קראָם ז0 אין די לענג פּאַראַמעטער פון די נומער 2 געצייַג, און רופן די געצייַג לענג קערעקשאַן G43H02 ווען ניצן די רגע געצייַג פֿאַר מאַשינינג.
5. Top מעסער באַשטעטיקן אופֿן
(1) געצייַג באַשטעטיקן אין רענטגענ און י ריכטונג.
① ינסטאַלירן די וואָרקפּיעסע אויף די מאַשין געצייַג וואָרקטיש דורך די ייַנאָרדענונג און פאַרבייַטן עס מיט די צענטער.
② מאַך די וואָרקטיש און שפּינדל געשווינד צו מאַך די שפּיץ נאָענט צו די וואָרקפּיעסע, געפֿינען די צענטער פונט פון די וואָרקפּיעסע צייכענונג שורה, און רעדוצירן די גיכקייַט צו מאַך די שפּיץ נאָענט צו אים.
③ ניצן פיין-טונינג אָפּעראַציע אַנשטאָט, אַזוי אַז די שפּיץ סלאָולי אַפּראָוטשיז די צענטער פונט פון די וואָרקפּיעסע צייכענונג שורה ביז די שפּיץ שפּיץ איז אַליינד מיט די צענטער פונט פון די וואָרקפּיעסע צייכענונג שורה. באַמערקונג אַראָפּ די רענטגענ און י קאָואָרדאַנאַט וואַלועס אין די מאַשין געצייַג קאָואָרדאַנאַט סיסטעם אין דעם צייט.
(2) אַראָפּנעמען דעם צענטער, ינסטאַלירן די מילינג צושנייַדער און נוצן אנדערע מכשירים באַשטעטיקן מעטהאָדס אַזאַ ווי פּראָצעס קאַטינג אופֿן, פילער מאָס אופֿן, אאז"ו ו צו באַקומען די ז-אַקס קאָואָרדאַנאַט ווערט.
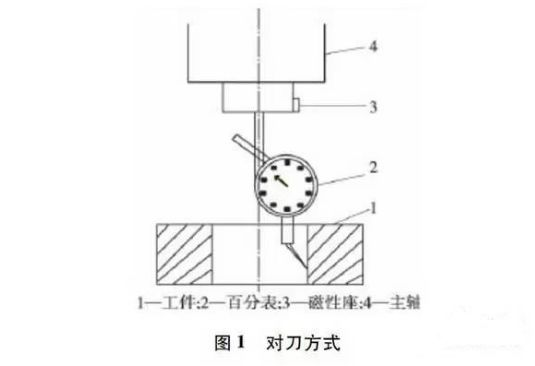
6. רעדל גראדן (אָדער רעדל גראדן) געצייַג באַשטעטיקן אופֿן
רעדל גראדן (אָדער רעדל גראדן) געצייַג באַשטעטיקן אופֿן (בכלל געניצט פֿאַר געצייַג באַשטעטיקן פון קייַלעכיק וואָרקפּיעסעס)
(1) געצייַג באַשטעטיקן אין רענטגענ און י ריכטונג.
ינסטאַלירן די מאַונטינג רוט פון די רעדל גראדן אויף די געצייַג שעפּן, אָדער צוטשעפּען די מאַגנעטיק אַוועקזעצן פון די רעדל גראדן צו די שפּינדל אַרבל. מאַך די וואָרקבענטש אַזוי אַז די צענטער שורה פון די שפּינדל (ד"ה, דער צענטער פון די געצייַג) באוועגט בעערעך צו די צענטער פון די וואָרקפּיעסע, און סטרויערן די מאַגנעטיק אַוועקזעצן. די לענג און ווינקל פון די טעלאַסקאָפּיק רוט זענען אַזוי אַז די קאָנטאַקטן פון די רעדל גראדן קאָנטאַקט די סערקאַמפערענטשאַל ייבערפלאַך פון די וואָרקפּיעסע. (דער טייַטל ראָוטייץ וועגן 0.1 מם.) סלאָולי קער די שפּינדל מיט האַנט צו מאַכן די קאָנטאַקטן פון די רעדל גראדן דרייען צוזאמען די סערקאַמפערענטשאַל ייבערפלאַך פון די וואָרקפּיעסע. אָבסערווירן צו קאָנטראָלירן די באַוועגונג פון די רעדל גראדן טייַטל, מאַך די אַקס פון די וואָרקבענטש סלאָולי און איבערחזרן עס עטלעכע מאָל. ווען די שפּינדל איז אויסגעדרייט, די רעדל גראדן טייַטל איז בייסיקלי אין דער זעלביקער שטעלע (ווען די מעטער קאָפּ ראָוטייץ אַמאָל, די שפּרונג סומע פון די טייַטל איז ין דער אַלאַואַבאַל געצייַג באַשטעטיקן טעות, אַזאַ ווי 0.02 מם), עס קענען זיין קאַנסידערד אַז צענטער פון דער שפּינדל איז דער אַקס און דער אָנהייב פון דער אַקס.
(2) אַראָפּנעמען די רעדל גראדן און ינסטאַלירן די מילינג קאַטער, און נוצן אנדערע מכשירים באַשטעטיקן מעטהאָדס אַזאַ ווי פּראָצעס קאַטינג אופֿן, פילער מאָס אופֿן, אאז"ו ו צו באַקומען די ז-אַקס קאָואָרדאַנאַט ווערט.
7. געצייַג באַשטעטיקן אופֿן מיט ספּעציעל געצייַג סעטער
די בעקאַבאָלעדיק געצייַג באַשטעטיקן אופֿן האט שאָרטקאָמינגס אַזאַ ווי נעבעך זיכערקייַט (אַזאַ ווי פילער מאָס געצייַג באַשטעטיקן, די געצייַג שפּיץ איז לייכט דאַמידזשד דורך אַ שווער צונויפשטויס), גענומען אַ פּלאַץ פון מאַשין צייט (אַזאַ ווי פּראָצעס קאַטינג, וואָס ריקווייערז ריפּיטיד קאַטינג עטלעכע מאָל) ), און גרויס טראַפ ערראָרס געפֿירט דורך יומאַנז. עס איז צוגעפאסט צו אָן די ריטם פון קנק מאַשינינג, עס איז נישט קאַנדוסיוו צו געבן פול שפּיל צו די פאַנגקשאַנז פון קנק מאַשין מכשירים.
ניצן אַ ספּעציעל געצייַג סעטער צו שטעלן מכשירים האט די אַדוואַנטידזשיז פון הויך געצייַג באַשטעטיקן אַקיעראַסי, הויך עפעקטיווקייַט און גוט זיכערקייַט. עס סימפּלאַפייז די טידיאַס געצייַג באַשטעטיקן אַרבעט געראַנטיד דורך דערפאַרונג און ינשורז די הויך עפעקטיווקייַט און הויך פּינטלעכקייַט פון CNC מאַשין מכשירים. עס איז געווארן אַ ספּעציעל געצייַג וואָס איז ינדיספּענסאַבאַל פֿאַר געצייַג באַשטעטיקן אויף CNC פּראַסעסינג מאשינען.
פּאָסטן צייט: נאוועמבער-01-2023


